//01The Bottleneck
The hand is what's holding robots back
- Robots already play chess, write code, and drive cars. Delicate hand work is the thing they still can't do well.
- Almost everything in the physical world is made to be handled by a human hand. A robot that can't use its hands can't do most real work.
- A good hand is the last piece standing between today's robots and useful work.
//02The Wall
Good robot hands exist. Almost nobody can afford them.
- The best research hand, the Shadow Hand, costs about $74,000, and over $180,000 with full sensors.
- The cheaper options are still far out of reach: the Allegro hand is about $16,000, PSYONIC's hand is $25,000 to $50,000, and the qb SoftHand is around €9,000.
- These hands work well. They are priced like specialized lab equipment, so they almost never make it onto real robots, prosthetic arms, or production lines.
//03The Real Cost
Why they cost so much: they are built by hand
- The parts are cheap. Open-source hands that publish their parts lists cost roughly $1,300 to $2,200 in components.
- The expense is skilled human labor. These hands are made in tiny numbers, one at a time, and industry studies put assembly at roughly a third to half of the build cost for devices this complex.
- The slowest, most expensive step is threading and tensioning the hand's thin control cables, called tendons, by hand. That step alone takes hours per hand and often has to be redone. It is the main reason these hands stay rare and expensive, and it is the cost that does not get cheaper as you make more.
//04The Product
We build the same kind of hand for the price of its parts
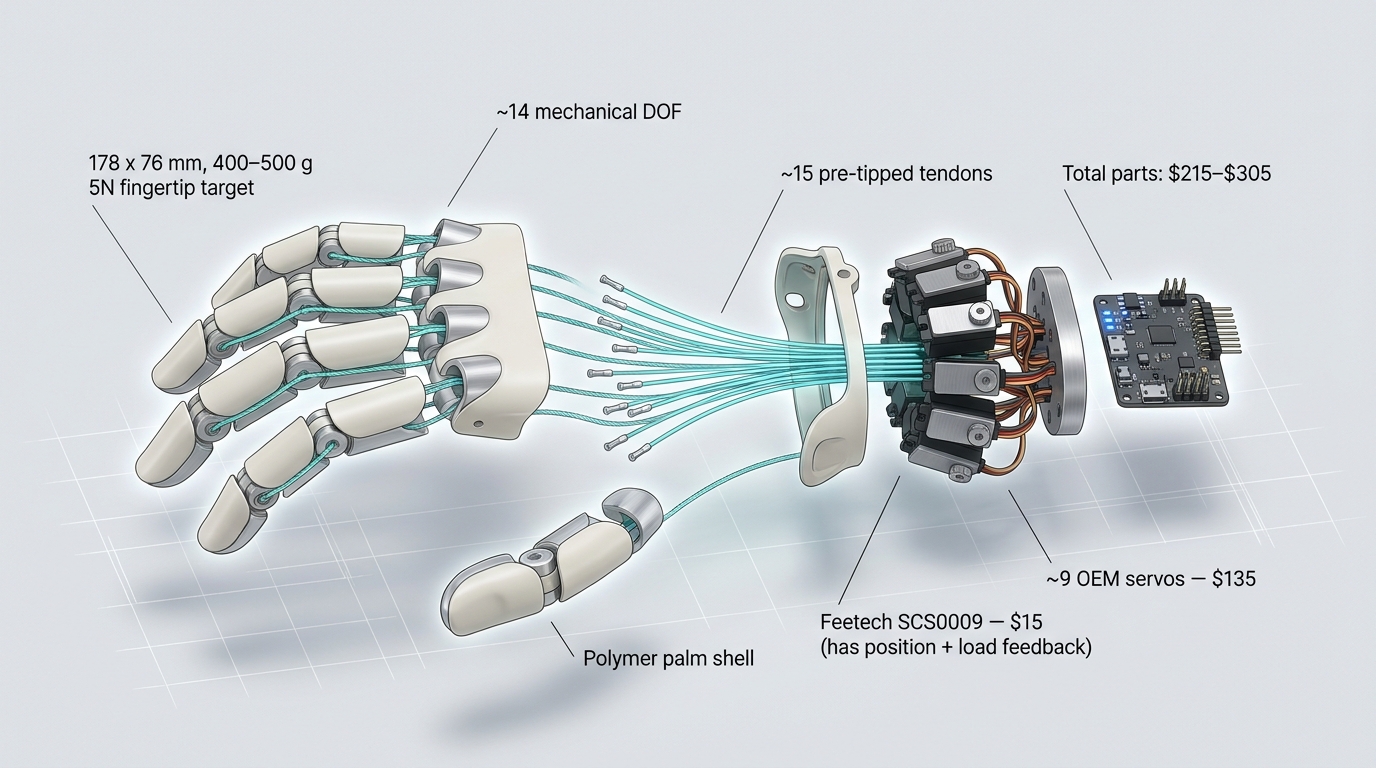
- Our hand is human-sized: about 18 cm long and under 500 grams, the size and weight of an adult hand.
- It moves with close to the range of motion of a human hand, driven by thin cables (tendons) that small motors pull, the way the tendons in your arm move your fingers.
- Total parts cost is $215 to $305. The motors are the biggest single cost, about $135 for nine small servo motors at roughly $15 each.
- We make the hand. The software that decides how to grip and move is built by our customers and the wider industry. We supply the physical hand they all need. In a gold rush, we sell shovels.
//05The Key Choice
A light, precise touch is all most work needs
- Most useful hand work, including fine assembly and the data-collection tasks we start with, needs a precise, gentle grip, not crushing force.
- We aim for about the grip strength you use to hold a phone or pick up a cup. That is plenty for the work that matters, and it is what lets us use small, cheap motors instead of expensive heavy-duty ones.
- If a future market needs more strength, like heavy industrial work, the same design takes bigger motors without other changes.
//06The Beachhead
Our first customers: AI labs that need many hands
- The teams training robot "brains" need to collect huge amounts of hands-on demonstration data: picking things up, plugging things in, folding, sorting. That is exactly the precise, low-force work our hand is built for.
- They need a lot of hands and cannot justify $16,000 to $74,000 each. A capable hand at $215 to $305 changes what they can do.
- This market is large, growing fast, and wants the most hands for the least money, which is exactly what we deliver.
//07The Big Idea
The big idea: hands that help build hands
- The expensive bottleneck in making these hands is the hours of skilled work threading and tensioning the cables by hand. That is the step we remove.
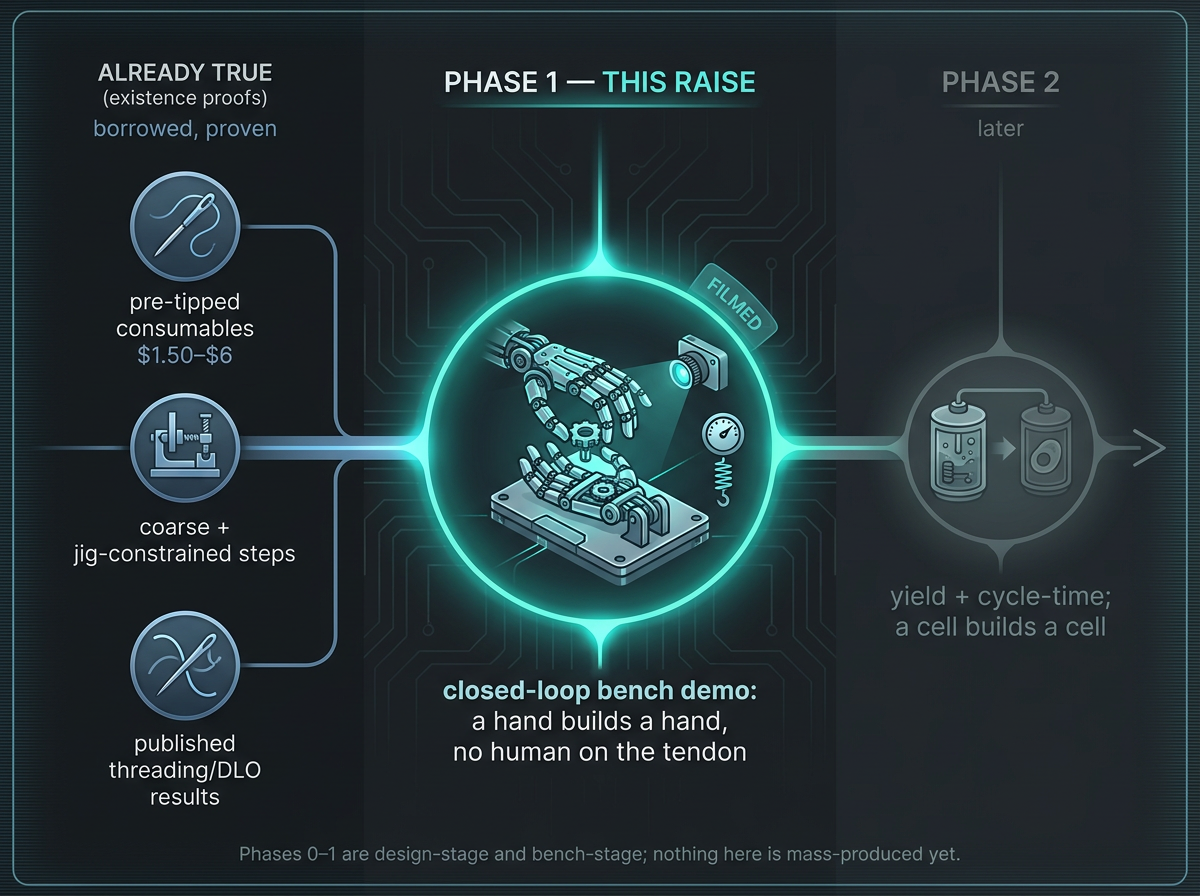
- We redesign the hand, and the way it is put together, so that fiddly cable work becomes a few simple, repeatable moves a robot can do. For example, the cables come pre-made with stiff, easy-to-grab tips, the way a surgical stitch comes with the needle already attached.
- We put the hands together at a small automated assembly station. As our own hands get good enough, they take over that assembly work, so each batch of hands helps build the next batch.
- The result: the labor cost of each hand keeps falling, and we can grow output without hiring more skilled assemblers. That is how a hardware company can scale the way software does.
//08The Proof
What this round proves
- Today this is a finished design and a full parts list. We have not yet had a hand build a hand, and we are clear about that.
- This round funds one milestone, on video: a robot at our assembly station building a complete, working hand, including the cable step, with no person touching the cables.
- If it works, the cost savings and the scaling we describe begin. If it does not, we find out quickly and cheaply.
//09Reliability
Built to be cheap to fix
- The fingers and motors are snap-in modules. When a cheap part wears out, you swap the module in seconds for a few dollars, instead of sending a $74,000 instrument away for repair.
- We expect each module to last thousands of normal-use cycles before a swap. We will publish the real number from the first build, and we have set a clear bar it has to clear.
//10The Moat
Why a big company can't just copy us
- The valuable part is the design that ties the hand to the process that builds it. A copycat has to re-invent that whole process, which is far harder than sourcing $15 motors. We will patent the process once the first demo proves it, and keep the key software and specifications as trade secrets.
- We get a head start down the cost curve, and our own hands keep automating the remaining work, so a latecomer is always chasing a moving target.
- We sell to everyone who is not building their own humanoid robot: the many AI labs, prosthetics makers, and service-robot companies that will never set up a hand factory. If a giant builds hands only for itself, we lose one customer, not the market.

//11The Trajectory
Two very different cost curves
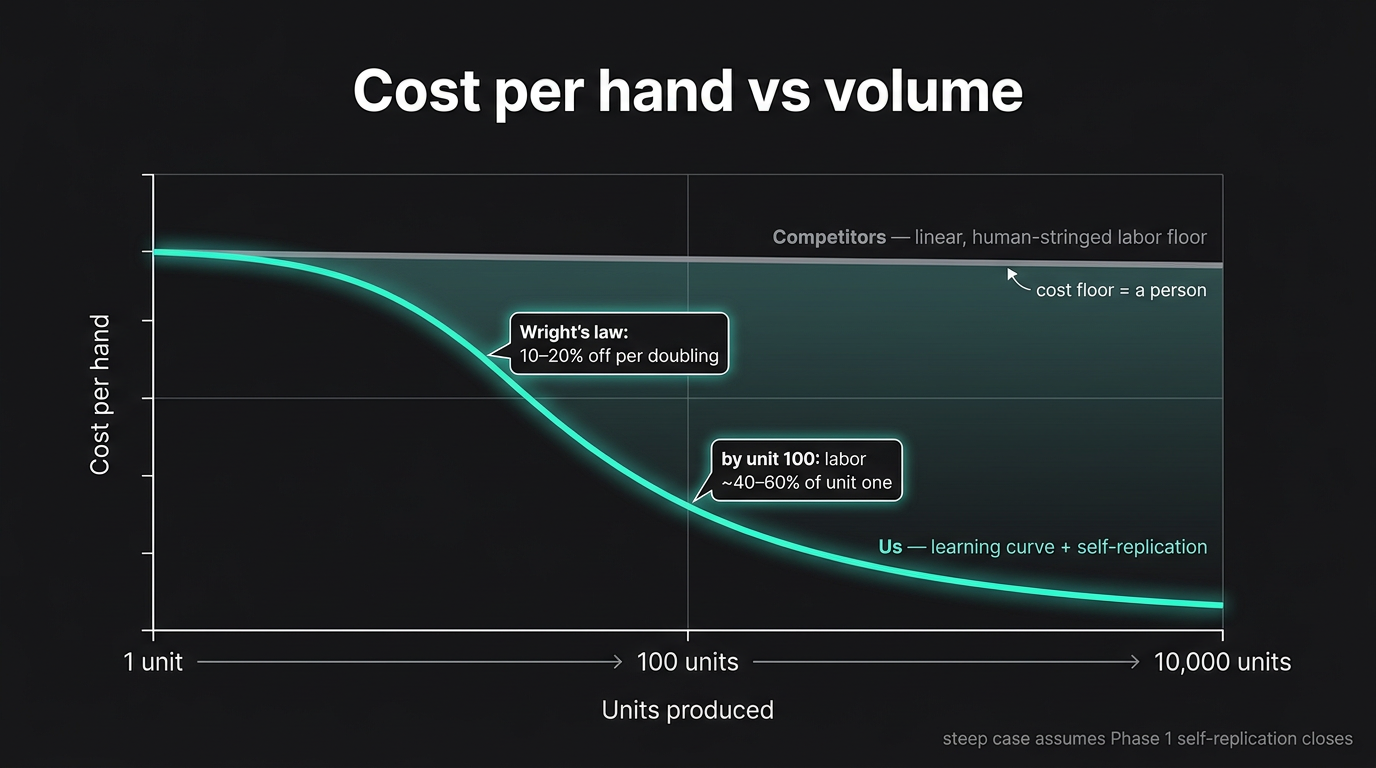
- Competitors get more expensive to scale. Ten times the hands means ten times the skilled assembly hours. Their cost is tied to people, and people do not get cheaper.
- Our cost falls as we scale. Costs drop in the normal way as volume grows, and on top of that our own hands take over the assembly. So the cost per hand keeps dropping the more we make.
- The steepest version of this depends on the self-building demo working, which is what this round funds.
//12The Market
Where this goes
- Start: hands for AI labs collecting manipulation data.
- Next: prosthetic hands. Human-sized and human-strength is exactly our design, against today's $25,000 to $50,000 options.
- Then: service robots, where a simple gripper is not dexterous enough and a $74,000 hand is too expensive.
- Long term: humanoid robots. Analysts project a $38 billion market by 2035 (Goldman Sachs), with the robot-hand segment alone growing from about $815 million in 2024 to $10.3 billion in 2031. On a humanoid, the hands are about 17% of the parts cost, roughly $9,500 (Morgan Stanley), the most expensive part after the legs, and there are two hands per robot.
//13The Ask
What we are raising
- This round funds one thing: prove, on video, that a robot can build one of our hands without a person doing the cable work.
- The milestones: the first robot-built hand, a published durability number for the snap-in modules, and the first hands delivered to AI-lab customers.
We are raising [SEED AMOUNT, founder to set; about $2 to $4 million is a reasonable placeholder] to build one assembly station, fund roughly 9 to 15 months of work, a small engineering team, and the first customer hands.
This round funds the single demo that proves the whole idea: a robot building one of our hands. Fund that, and the cost curve we have shown you starts.